Research
-
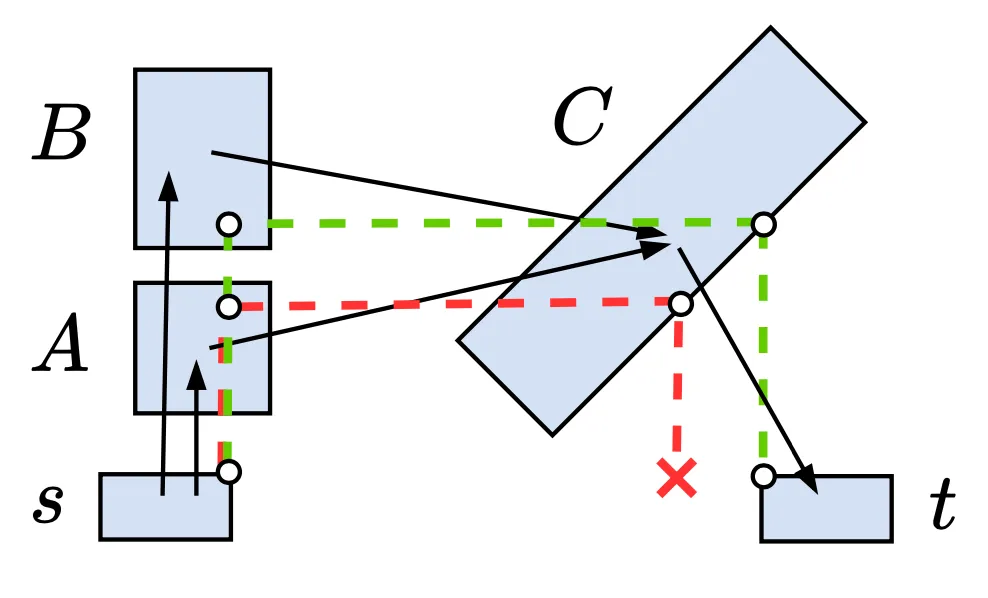 GCS*: Forward Heuristic Search on Implicit Graphs of Convex Sets
GCS*: Forward Heuristic Search on Implicit Graphs of Convex Sets- Shao Yuan Chew Chia, Rebecca H. Jiang, Bernhard Paus Graesdal, Leslie Pack Kaelbling, Russ Tedrake
A complete and optimal algorithm inspired by A* for finding shortest paths on Graphs of Convex Sets.
Workshop on the Algorithmic Foundations of Robotics 2024
- conference
-
 Towards Tight Convex Relaxations for Contact-Rich Manipulation
Towards Tight Convex Relaxations for Contact-Rich Manipulation- Bernhard Paus Graesdal, Shao Yuan Chew Chia, Tobia Marcucci, Savva Morozov, Alexandre Amice, Pablo A. Parrilo, Russ Tedrake
We introduce a motion planning method for planning optimal contact-rich robot trajectories through the use of tight convex relaxations, and demonstrate its effectiveness on a non-prehensile manipulation task in the plane where a state-of-the-art usually fails.
Robotics: Science and Systems 2024
- conference